Kilka wniosków z tego doświadczenia.
Po pierwsze, i to też zaznaczyłem w artykule, przeliczenia oparte są na modelu masy na sprężynie (spring mass model). Ten model przewija się w wielu pracach naukowych. Można na niego narzekać, że jest topornym uproszczeniem itd. Bo jest toporny. Jeśli chce się wyznaczyć profil GRF, to ten model się nie nadaje. Pewnym rozwiązaniem jest model dwumasowy, gdzie uwzględnia się masę nogi podporowej, a nie jak w tamtym, że jest sprężyna i na niej masa zredukowana do punktu. W tym dwumasowym modelu da się już uzyskać charakterystyczny kształt przebiegu GRF z takimi dwoma pikami. Wciąż jednak model dwumasowy nie uwzględnia na przykład rotacji w stawach i innych rzeczy, a to jest kluczowa sprawa w biomechanice biegu.
Po drugie, model masy na sprężynie jest używany do analizy pionowej składowej GRF. Model dwumasowy też, choć ma potencjał rozwojowy, co jednak wiąże się ze zwiększeniem komplikacji modelu, założeń dla takiego modelowania, no i oczywiście wymaga wtedy danych z innych kierunków.
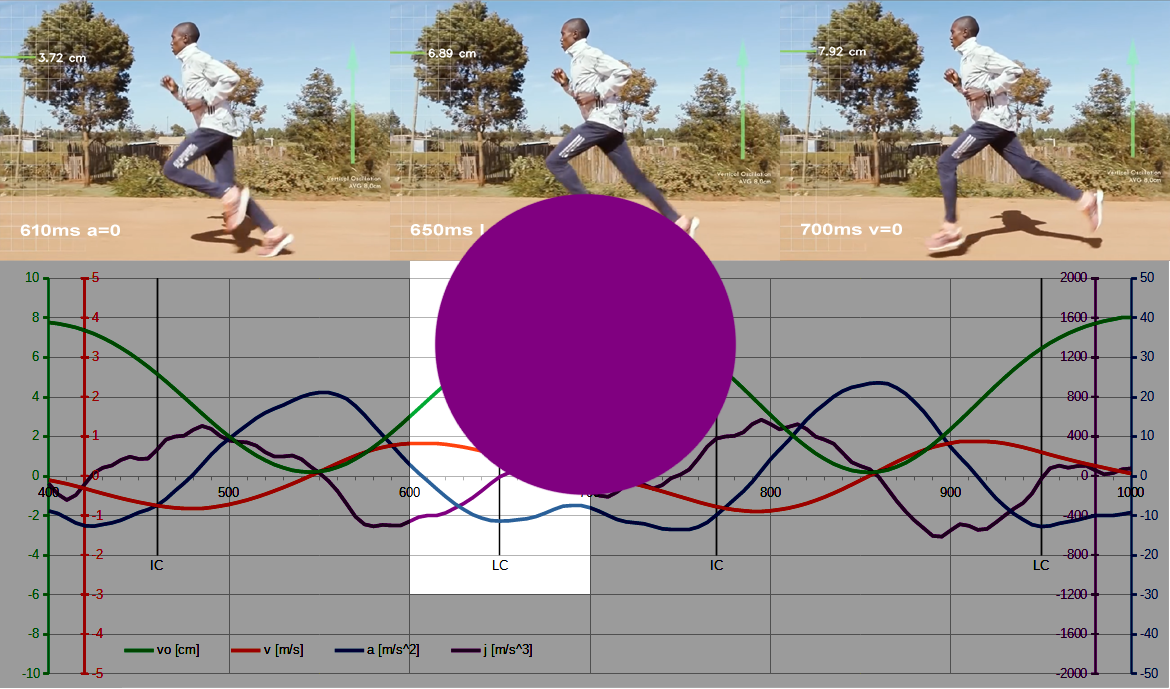
Po trzecie, klip wideo pozwala na wyciągnięcie danych z kierunku pionowego. Z poziomego raczej nie ma szans, bo nie ma żadnego pewnego punktu odniesienia (nawet w takich
laboratoryjnych warunkach jest z tym problem). Znam drogę, po której oni biegali i można tam zęby stracić na wybojach, więc to wszystko lata w kadrze. O kierunku bocznym ruchu środka masy, to wiadomo, że można zapomnieć.
Po czwarte analiza wideo jest upierdliwa. Wymaga stałych warunków biegu. Wtedy można ew. coś z tego wyciągnąć, ale to i tak nie zastąpi platform siłowych, z których mamy piękne przebiegi GRF_xyz. Tyle, że platformy są jeszcze bardziej upierdliwe. Bo trzeba na taką platformę nabiec, trafić, nie myśleć o tym że trzeba trafić, bo wtedy ten krok i lądowanie inne wyjdzie, a potem trzeba drugą nogą trafić itd.
To tyle jeśli chodzi o minusy i ograniczenia. Natomiast samo przejście przez takie doświadczenie, nawet z tym modelem na sprężynie, daje powody do rozkmin. To jest wystarczający plus, który równoważy tamte minusy. Kolejny krok, to teraz obróbka własnych danych z IMU, które dają informacje z trzech kierunków. Do tego dochodzą też rotacje z tych kierunków. Oczywiście są też problemy związane z zastosowaniem takich czujników, ale o tym może później.