
Jacek Ksiąszkiewicz – czy istnieje ładne bieganie?
-
yacool

- Zaprawiony W Bojach

- Posty: 13626
- Rejestracja: 03 gru 2008, 11:25
- Kontakt:
To jest ekstremalnie mało i zdaje się potwierdzać moje wcześniejsze wyliczenia w przypadku Kejelchy.

-
yacool
- Zaprawiony W Bojach
- Posty: 13626
- Rejestracja: 03 gru 2008, 11:25
- Kontakt:
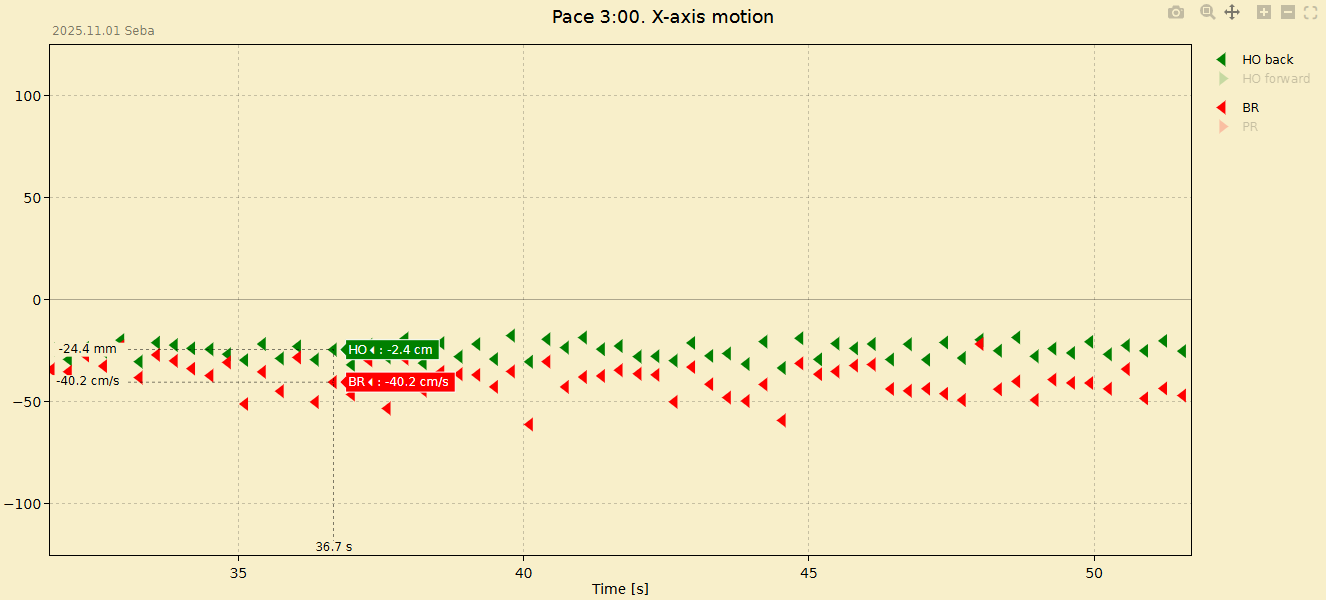
Czas na najciekawszą część wykresu, czyli strona hamowania i ładowania tkanek. Od niej zależy potem jakość wybicia. Analogicznie jak opisywałem to dla ruchu w pionie, tutaj również analizowane szczegóły wykraczają daleko poza obecne standardy analizy biomechanicznej.
Widok metryczny na interesujące parametry:
HO⏴z trójkątem w lewo, czyli oscylacja miednicy dla ruchu w tył.
BR⏴(braking) czyli dynamika ruchu miednicy w tył
Widok kinematyczny:
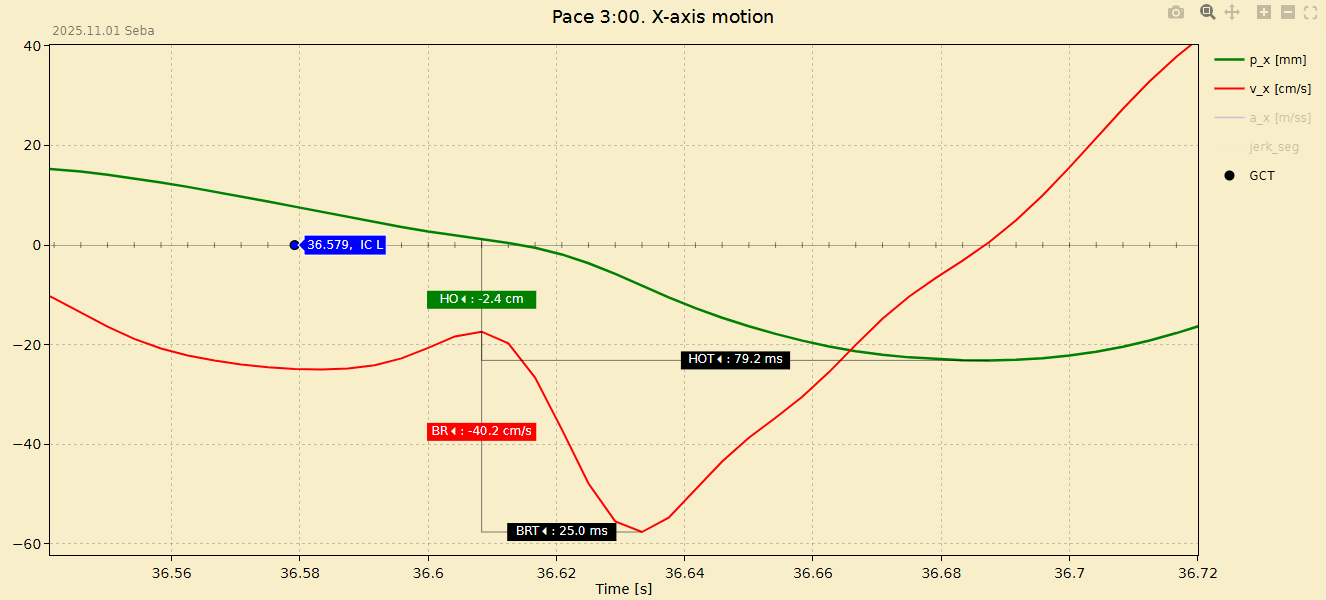
HO⏴mierzony jest nie od IC jak to było w przypadku VO⏷ lecz od lokalnego minimum BR⏴(rozwinę to zagadnienie za chwilę) do zielonego dołka pozycji oznaczającego maksymalne cofnięcie miednicy. Na wykresie mamy widoczną wartość HO⏴= -2.4cm. Czas, w którym miednica cofa się wynosi HOT⏴= 79.2ms. Dla analizowanego kroku GCT= 179.2ms.
Relacja HO⏴/GCT to temat na inną rozkminę, bo tutaj trzeba zbadać przebiegi na różnych tempach, żeby mieć jakiekolwiek pojęcie, czy ten stosunek jest stały, czy może zmienia się w miarę wzrostu tempa, albo czy ma jakąś inną charakterystykę z przełamaniem, które sugerowałoby zmianę biomechaniki hamowania itd.
Kawka i potem parametr BR⏴czyli dynamika hamowania miednicy.
Widok metryczny na interesujące parametry:
HO⏴z trójkątem w lewo, czyli oscylacja miednicy dla ruchu w tył.
BR⏴(braking) czyli dynamika ruchu miednicy w tył
Widok kinematyczny:
HO⏴mierzony jest nie od IC jak to było w przypadku VO⏷ lecz od lokalnego minimum BR⏴(rozwinę to zagadnienie za chwilę) do zielonego dołka pozycji oznaczającego maksymalne cofnięcie miednicy. Na wykresie mamy widoczną wartość HO⏴= -2.4cm. Czas, w którym miednica cofa się wynosi HOT⏴= 79.2ms. Dla analizowanego kroku GCT= 179.2ms.
Relacja HO⏴/GCT to temat na inną rozkminę, bo tutaj trzeba zbadać przebiegi na różnych tempach, żeby mieć jakiekolwiek pojęcie, czy ten stosunek jest stały, czy może zmienia się w miarę wzrostu tempa, albo czy ma jakąś inną charakterystykę z przełamaniem, które sugerowałoby zmianę biomechaniki hamowania itd.
Kawka i potem parametr BR⏴czyli dynamika hamowania miednicy.
-
yacool
- Zaprawiony W Bojach
- Posty: 13626
- Rejestracja: 03 gru 2008, 11:25
- Kontakt:
Wrócę jeszcze do sparametryzowanego wykresu ze strony garmina.
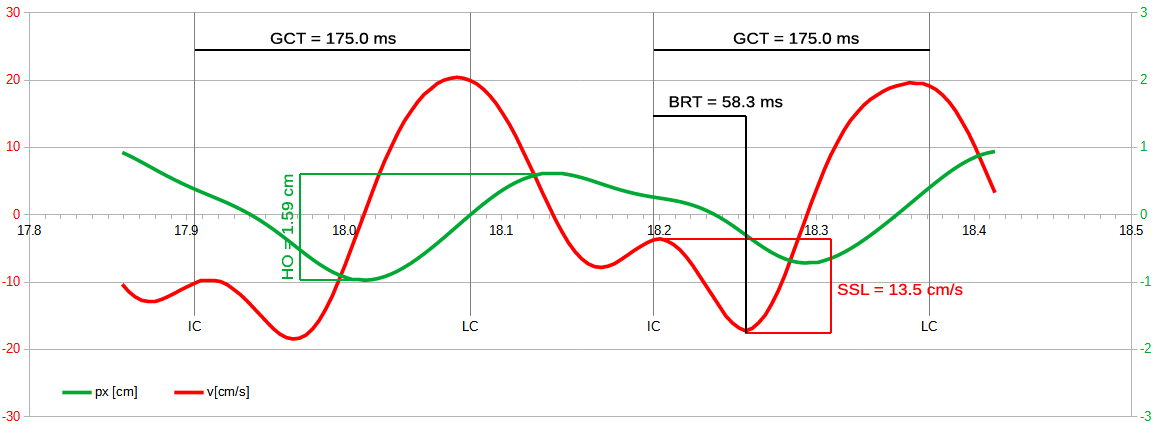
Metryka SSL mierzona jest tam od IC, ale nie zawsze początek hamowania (lokalne minimum - widoczne jako czerwona górka pod poziomą osią zerową) pokrywa się z IC. Na kroku wcześniejszym widać lepiej różnicę (około jednego frejma) pomiędzy tymi charakterystycznymi punktami przebiegu prędkości miednicy w IC i w lokalnym minimum. W przypadku biegu Sebastiana tych frejmów różnicy jest aż siedem (7 kresek na osi zerowej na wykresie poniżej), co w przeliczeniu daje około 29ms. To rodzi problem interpretacyjny. Poza tym SSL jest metryką serwerową obliczaną z pozostałych metryk, więc nie można się nią sugerować projektując algorytm dla BR⏴, czyli dla realnego pomiaru prędkości poziomej czujnikiem na miednicy.
Poniższy wykres uzupełniony jest o przebieg przyspieszenia miednicy (niebieska linia)
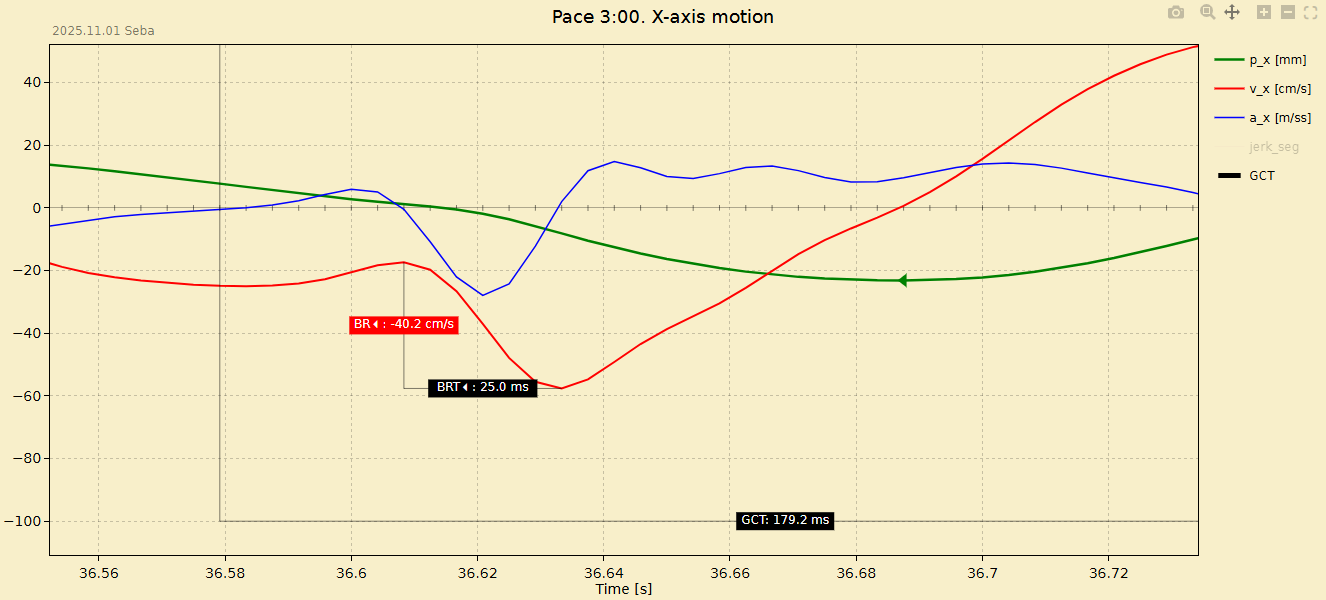
Widać na nim, że od IC przyspieszenie miednicy rośnie, czyli działa na nią siła skierowana w przód. Nie oznacza to, że miednica idzie w przód (zielona linia w analizowanym przedziale cały czas jest skierowana w dół), ale że jej ruch w tył zaczyna zwalniać. Jest to przykład na nieintuicyjność zjawisk dynamicznych. Stopa w IC hamuje natychmiast lecz miednica niekoniecznie (potrzebuje czasu na zrównoważenie składowej poziomej momentu obrotowego jaki powstaje w układzie stopa-miednica).
Dopiero zmiana znaku przyspieszenia (przejście przez zero), czyli okolice lokalnego szczytu czerwonej górki, oznacza początek hamowania. Od tego momentu widać wyraźny spadek prędkości, aż do czerwonego dołka. Pomiar od górki do dołka to jest nasz BR⏴= -40.2cm/s. Intensywne hamowanie tkankowe jest w przedziale czasowym BRT⏴=25.0ms. Tam właśnie dzieją się wszystkie zjawiska uderzeniowe, przemiany fazowej kolagenu, blokowania ruchu, ładowania tkanek, wzmocnienia hydraulicznego itd. Jeszcze raz odwołuję do najciekawszych fragmentów książki Earlsa. Przypomnijcie sobie. LINK. To książka o chodzeniu, a opisów dynamiki jest w niej jakby była o trójskoku.
Po przekroczeniu czerwonego dołka dynamika hamowania spada. Choć miednica wciąż się cofa, to przebieg przyspieszenia znów jest nad osią. Oznacza to pojawienie się siły ciągnącej miednicę do przodu, bo tkanki już zaczynają się rozładowywać. Miednica jest ciągnięta, ponieważ to wciąż może być faza wykroczna, więc z overstridingiem, czyli nie ma mowy o pchaniu, gdy punkt podparcia jest przed miednicą.
Stosunek czasu BRT⏴/GCT lub BRT⏴/ HOT⏴ może mieć tu jeszcze większy potencjał w analizie pracy tkankowej i jakości napędu.
Metryka SSL mierzona jest tam od IC, ale nie zawsze początek hamowania (lokalne minimum - widoczne jako czerwona górka pod poziomą osią zerową) pokrywa się z IC. Na kroku wcześniejszym widać lepiej różnicę (około jednego frejma) pomiędzy tymi charakterystycznymi punktami przebiegu prędkości miednicy w IC i w lokalnym minimum. W przypadku biegu Sebastiana tych frejmów różnicy jest aż siedem (7 kresek na osi zerowej na wykresie poniżej), co w przeliczeniu daje około 29ms. To rodzi problem interpretacyjny. Poza tym SSL jest metryką serwerową obliczaną z pozostałych metryk, więc nie można się nią sugerować projektując algorytm dla BR⏴, czyli dla realnego pomiaru prędkości poziomej czujnikiem na miednicy.
Poniższy wykres uzupełniony jest o przebieg przyspieszenia miednicy (niebieska linia)
Widać na nim, że od IC przyspieszenie miednicy rośnie, czyli działa na nią siła skierowana w przód. Nie oznacza to, że miednica idzie w przód (zielona linia w analizowanym przedziale cały czas jest skierowana w dół), ale że jej ruch w tył zaczyna zwalniać. Jest to przykład na nieintuicyjność zjawisk dynamicznych. Stopa w IC hamuje natychmiast lecz miednica niekoniecznie (potrzebuje czasu na zrównoważenie składowej poziomej momentu obrotowego jaki powstaje w układzie stopa-miednica).
Dopiero zmiana znaku przyspieszenia (przejście przez zero), czyli okolice lokalnego szczytu czerwonej górki, oznacza początek hamowania. Od tego momentu widać wyraźny spadek prędkości, aż do czerwonego dołka. Pomiar od górki do dołka to jest nasz BR⏴= -40.2cm/s. Intensywne hamowanie tkankowe jest w przedziale czasowym BRT⏴=25.0ms. Tam właśnie dzieją się wszystkie zjawiska uderzeniowe, przemiany fazowej kolagenu, blokowania ruchu, ładowania tkanek, wzmocnienia hydraulicznego itd. Jeszcze raz odwołuję do najciekawszych fragmentów książki Earlsa. Przypomnijcie sobie. LINK. To książka o chodzeniu, a opisów dynamiki jest w niej jakby była o trójskoku.
Po przekroczeniu czerwonego dołka dynamika hamowania spada. Choć miednica wciąż się cofa, to przebieg przyspieszenia znów jest nad osią. Oznacza to pojawienie się siły ciągnącej miednicę do przodu, bo tkanki już zaczynają się rozładowywać. Miednica jest ciągnięta, ponieważ to wciąż może być faza wykroczna, więc z overstridingiem, czyli nie ma mowy o pchaniu, gdy punkt podparcia jest przed miednicą.
Stosunek czasu BRT⏴/GCT lub BRT⏴/ HOT⏴ może mieć tu jeszcze większy potencjał w analizie pracy tkankowej i jakości napędu.
-
yacool
- Zaprawiony W Bojach
- Posty: 13626
- Rejestracja: 03 gru 2008, 11:25
- Kontakt:
Po ostatniej aktualizacji w connect garmin są liczone średnie SSL z odcinków. Do tej pory SSL podawany był zbiorczo z całego treningu, co było bez sensu. Teraz jest lepiej, ale trening nie może być wgrany jako interwał, bo tego jeszcze nie ogarnęli. Czyli zwykłe lapy.
Taki przykład:
2x3200m/2'p
Lap1: 9:41.2 3:02/km 178spm 182ms 1.84m 11.4cm 6.0% SSL 13.1
Lap2: 9:30.9 2:59/km 179spm 181ms 1.87m 11.2cm 5.8% SSL 14.4
Na drugiej serii widać wzrost ssl i spadek gct. Może to przypadek. Nie wiem. Dążymy do wyższego ssl i niższego czasu trwania fazy hamowania, ale czy można do tego wykorzystać gct? Tak to jest z bieda pomiarami, pośrednimi metrykami i błędnym założeniem, że hamowanie powinno być mniejsze. Dopóki garmin nie zmieni definicji ssl i nie zacznie realnie mierzyć, zamiast szacować, to wszystko stoi w miejscu. Nie ma rozwoju w temacie pomiarów dynamiki biegu.
Taki przykład:
2x3200m/2'p
Lap1: 9:41.2 3:02/km 178spm 182ms 1.84m 11.4cm 6.0% SSL 13.1
Lap2: 9:30.9 2:59/km 179spm 181ms 1.87m 11.2cm 5.8% SSL 14.4
Na drugiej serii widać wzrost ssl i spadek gct. Może to przypadek. Nie wiem. Dążymy do wyższego ssl i niższego czasu trwania fazy hamowania, ale czy można do tego wykorzystać gct? Tak to jest z bieda pomiarami, pośrednimi metrykami i błędnym założeniem, że hamowanie powinno być mniejsze. Dopóki garmin nie zmieni definicji ssl i nie zacznie realnie mierzyć, zamiast szacować, to wszystko stoi w miejscu. Nie ma rozwoju w temacie pomiarów dynamiki biegu.
-
yacool
- Zaprawiony W Bojach
- Posty: 13626
- Rejestracja: 03 gru 2008, 11:25
- Kontakt:
Bas Van Hooren wraca jak bumerang i jest bezmyślnie powielany. Pisałem już o nim tutaj.Do tego przede wszystkim przyda ci się trening siłowy, plyometryczny, wytrzymałościowy oraz praca nad samą techniką biegu [1,3].
...
Źródła:
[1] Bas Van Hooren,
LINK
Fizjoterapeuci nie mają pojęcia o technice biegu i zwyczajnie zgadują. Wcześniejszy przykład tych ich pierdół o technice biegu i co trzeba robić żeby ją poprawić. Tym bardziej jest to żenujące jeśli wypowiadają się o wyczynie bez jakichkolwiek danych.
edit:
słyszeliście o sprintach pod górkę? Podobno świetnie kształtują technikę biegu.

prawdziwy hard-cor
-
Olaboga
- Stary Wyga

- Posty: 151
- Rejestracja: 23 sty 2022, 14:32
- Życiówka na 10k: 49:26
- Życiówka w maratonie: brak
https://www.youtube.com/watch?v=pNeljUB0-YI
miniaturka z tego filmiku, no nie, nasza Natalia tak nie realizuje kroku.
miniaturka z tego filmiku, no nie, nasza Natalia tak nie realizuje kroku.
-
yacool
- Zaprawiony W Bojach
- Posty: 13626
- Rejestracja: 03 gru 2008, 11:25
- Kontakt:
O 51.49 Hodgkinson na 400 w hali miałem pisać. Wrażenie robi fakt, że jest to biegane cały czas w stylu średniaka. Świetna sprawa. Czyli da się biegać naprawdę szybko bez typowo sprinterskiego trybu pracy. To już Van Niekerk pokazał dekadę temu, że 400m można nazwać w jego przypadku skróconym biegiem średnim, a nie wydłużonym sprintem.
-
yacool
- Zaprawiony W Bojach
- Posty: 13626
- Rejestracja: 03 gru 2008, 11:25
- Kontakt:
Prace nad szybkim bieganiem postępują już bez udziału inżynierów klepiących kod. Po prostu proces jest puszczony samemu sobie i szuka optimum.
normalnie bym to zlał widząc takie kalectwo i odesłał Grzesia z powrotem do garażu i niech wróci za kilka lat z lepszym modelem, ale tam na liczniku jest prędkość 10m/s. Nawet lekko ponad, czyli można już dowolnie długo utrzymać tę prędkość, bo algorytm opanował lokomocję w tym tempie, co daje poniżej 10s na każde 100m.
No i teraz rodzą się pytania właśnie o rytm i wzmocnienia jako dalsze kierunki prac nad optymalizacją. W przypadku robota można zauważyć, że ramię idzie bardziej do przodu niż do tyłu. Być może algorytm wybrał rytm sprinterski, gdzie nie tylko geometria pracy rąk jest inna, ale przede wszystkim jest inna fazowość działania. Pisałem o tym ostatnio przy okazji Femke Bol i jej debiutu na 800.
Dlaczego uczenie maszynowe poszło taką drogą? Czy oprócz priorytetu jakim jest prędkość, istnieje jeszcze coś w rodzaju ochrony konstrukcji przed przeciążeniami? Jak kolejne konstrukcje będą wpływać na algorytm lokomocyjny?
Zmiana rytmu na długodystansowy bardziej przeciąża ciało (strukturę), bo rośnie dynamika hamowania, ale rośnie też potencjał wykorzystania elastyczności. Czy to będzie brane pod uwagę, gdy robot dostanie na plecki baterię o ograniczonej pojemności? Itd. itp. Pytań jak zwykle więcej niż na początku.
... a tu tak mi się skojarzyło z Robonatalią

Mój komentarz:Grzegorz robotyk pisze:Uczenie maszynowe wykombinowało że, aby zapierdalać miednicę trzeba wypchnąć do przodu (widać na samym początku), a nie jakieś pose i pochylanie się z kostki. Maszyna sama znalazła optimum.
normalnie bym to zlał widząc takie kalectwo i odesłał Grzesia z powrotem do garażu i niech wróci za kilka lat z lepszym modelem, ale tam na liczniku jest prędkość 10m/s. Nawet lekko ponad, czyli można już dowolnie długo utrzymać tę prędkość, bo algorytm opanował lokomocję w tym tempie, co daje poniżej 10s na każde 100m.
No i teraz rodzą się pytania właśnie o rytm i wzmocnienia jako dalsze kierunki prac nad optymalizacją. W przypadku robota można zauważyć, że ramię idzie bardziej do przodu niż do tyłu. Być może algorytm wybrał rytm sprinterski, gdzie nie tylko geometria pracy rąk jest inna, ale przede wszystkim jest inna fazowość działania. Pisałem o tym ostatnio przy okazji Femke Bol i jej debiutu na 800.
Dlaczego uczenie maszynowe poszło taką drogą? Czy oprócz priorytetu jakim jest prędkość, istnieje jeszcze coś w rodzaju ochrony konstrukcji przed przeciążeniami? Jak kolejne konstrukcje będą wpływać na algorytm lokomocyjny?
Zmiana rytmu na długodystansowy bardziej przeciąża ciało (strukturę), bo rośnie dynamika hamowania, ale rośnie też potencjał wykorzystania elastyczności. Czy to będzie brane pod uwagę, gdy robot dostanie na plecki baterię o ograniczonej pojemności? Itd. itp. Pytań jak zwykle więcej niż na początku.
... a tu tak mi się skojarzyło z Robonatalią
-
Jajo
- Wyga

- Posty: 107
- Rejestracja: 21 paź 2020, 10:51
- Życiówka na 10k: brak
- Życiówka w maratonie: brak
Na tym filmiku to nie wygląda na rytm ani sprinterski, ani długodystansowy, tylko robotyczny 
Te roboty to mają obecnie problem nie tylko z prędkością, ale też z równowagą i to są chyba priorytety, więc jeszcze dużo czasu minie, zanim zaczną się skupiać na efektywności zużycia energii, a i tak nie wiadomo, czy coś się z tego dowiemy, bo taki robot nie będzie 1:1 działał jak człowiek. Nie będzie tam ludzkiego rozkładu kości i mięśni, nie będzie cieczy nieniutonowskiej i takie tam.
Tutaj Klawiatur pokazuje zawody robotów z ubiegłego roku. No daleko im do standardu ruchu człowieka, nawet zachodniego...
https://youtu.be/cOJY_kyLChw?is=pWV_urV-QYlDOqK5
Te roboty to mają obecnie problem nie tylko z prędkością, ale też z równowagą i to są chyba priorytety, więc jeszcze dużo czasu minie, zanim zaczną się skupiać na efektywności zużycia energii, a i tak nie wiadomo, czy coś się z tego dowiemy, bo taki robot nie będzie 1:1 działał jak człowiek. Nie będzie tam ludzkiego rozkładu kości i mięśni, nie będzie cieczy nieniutonowskiej i takie tam.
Tutaj Klawiatur pokazuje zawody robotów z ubiegłego roku. No daleko im do standardu ruchu człowieka, nawet zachodniego...
https://youtu.be/cOJY_kyLChw?is=pWV_urV-QYlDOqK5
